
Soap bubbles, and machines to make them, are a perfect medium for exploration of dynamics as well as creativity. I’ve found that creating ornate machines that can weave fluid and air together delights and inspires people, not just myself, more authentically than anything I’ve ever done. This page details some of the work I’m doing towards a family of new works, creating transient but extremely beautiful physical phenomena, with a mechanism that is itself also beautiful in it’s functionality.
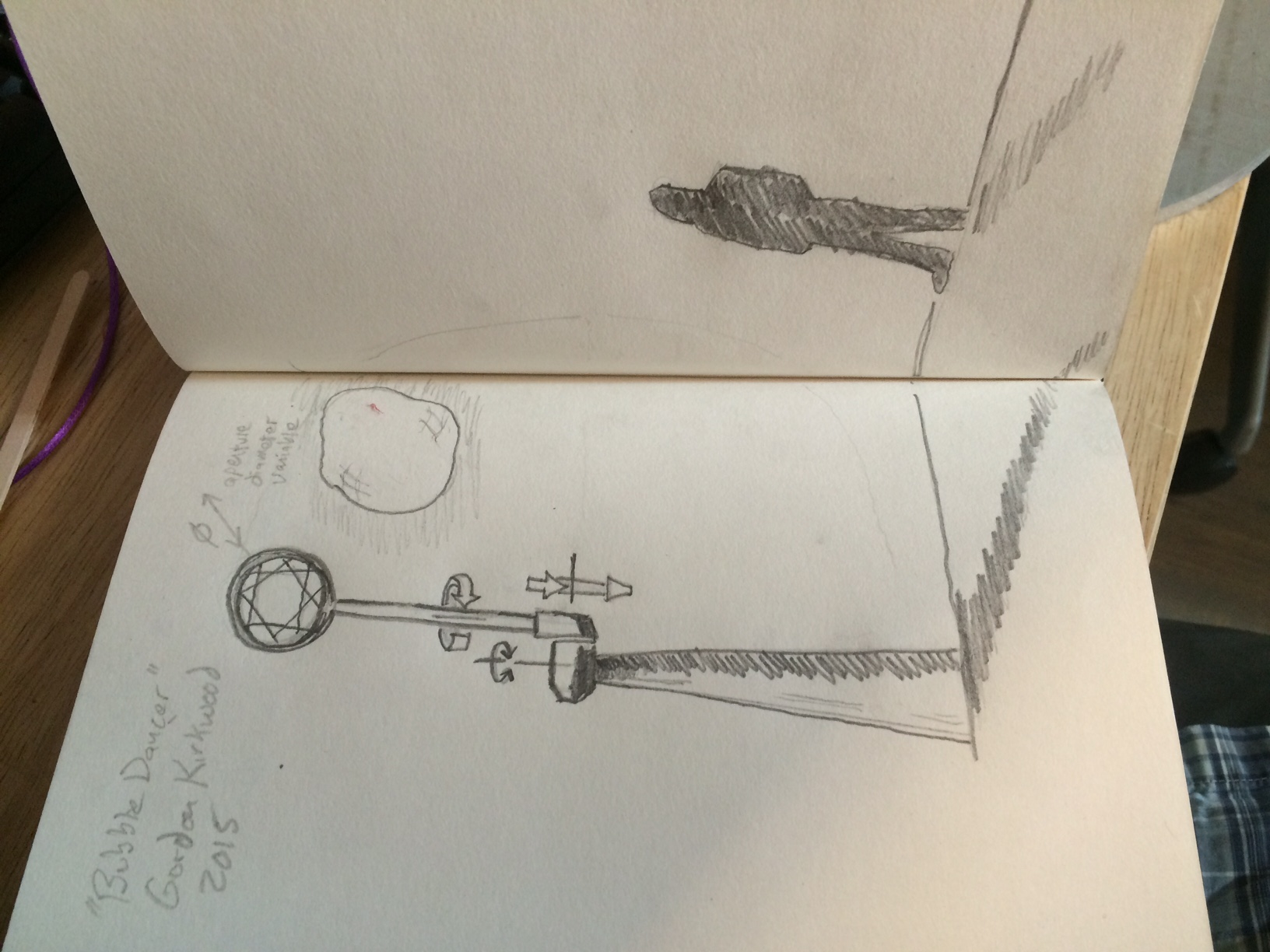
“Bubble Dancer” is one of several projects. In this work, a Kirkwood Cable Iris is mounted on a robotic arm, and swept through space, trailing behind a diversity of contrails of huge tubulular soap tunnels which, in a dynamic dance of fluid tension and aerodynamic pressure, create astonishing ephemeral forms, as their dynamics play out. The closest analogy is to silk ribbon dancing, in which complex motions of a wand trailing a lightweight silk ribbbon, is elevated to an exceptional artform. The soap membranes are even lighter and more fluid than silk, and have the added flexibility of additional degrees of freedom to break off, twist, and be formed by air currents and other influences.


{kind=link}
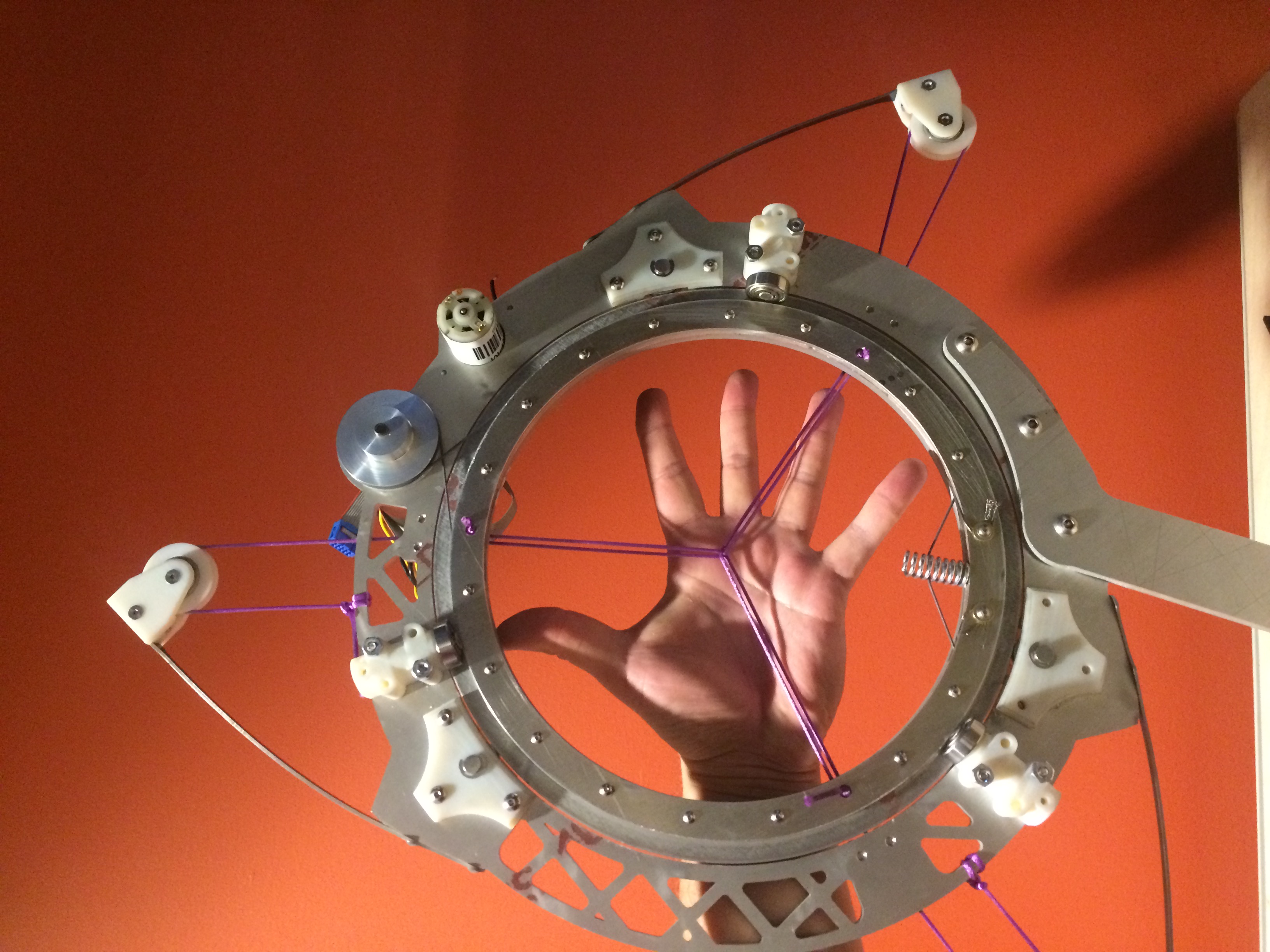
Hand for scale.
Hand Actuation test:
Servo Motor energized and under control:
Servo control with slower acceleration:
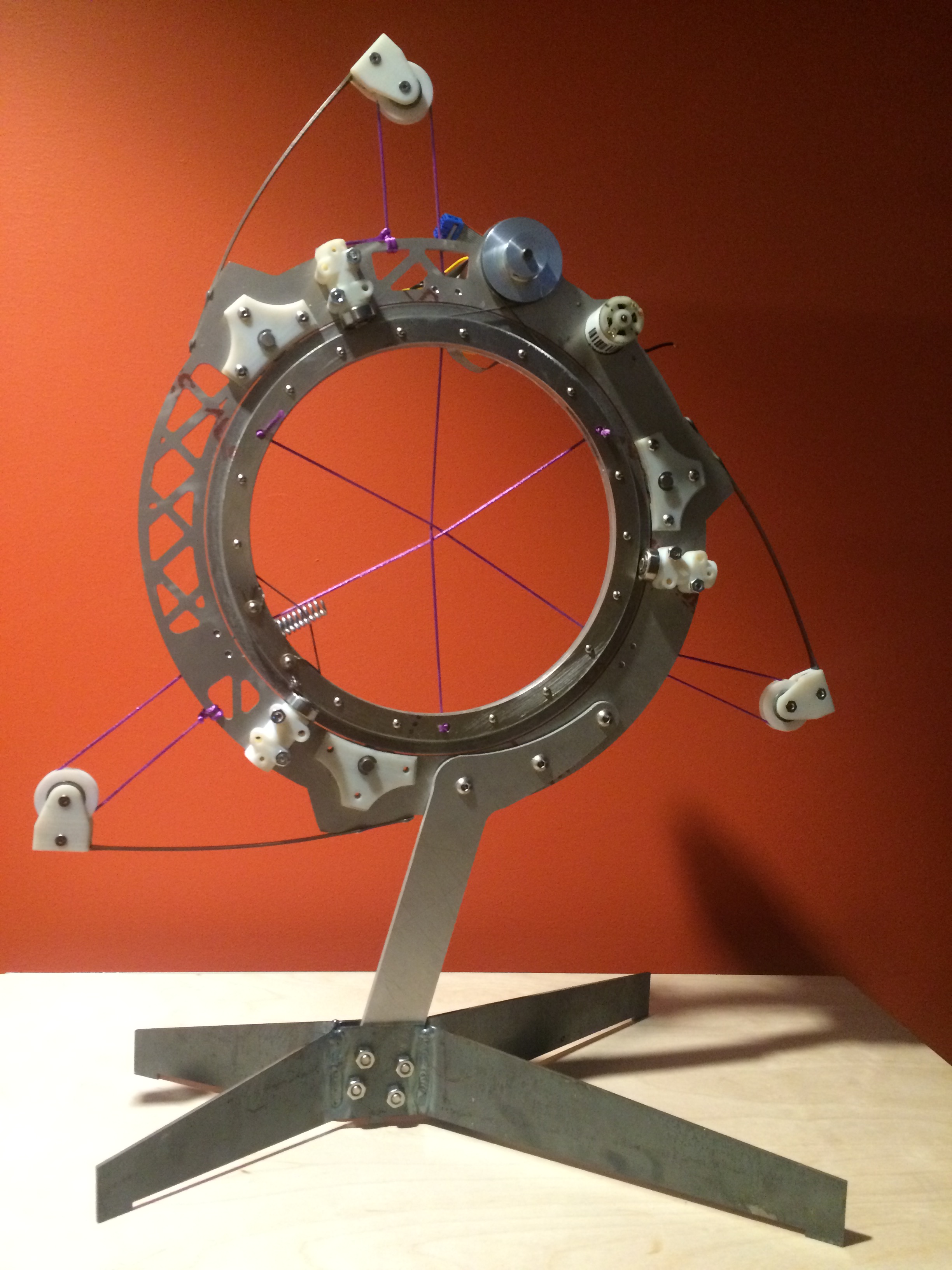
Heavy duty cycloidal bearing and gearbox mount for azimuth and elevation degrees of freedom:
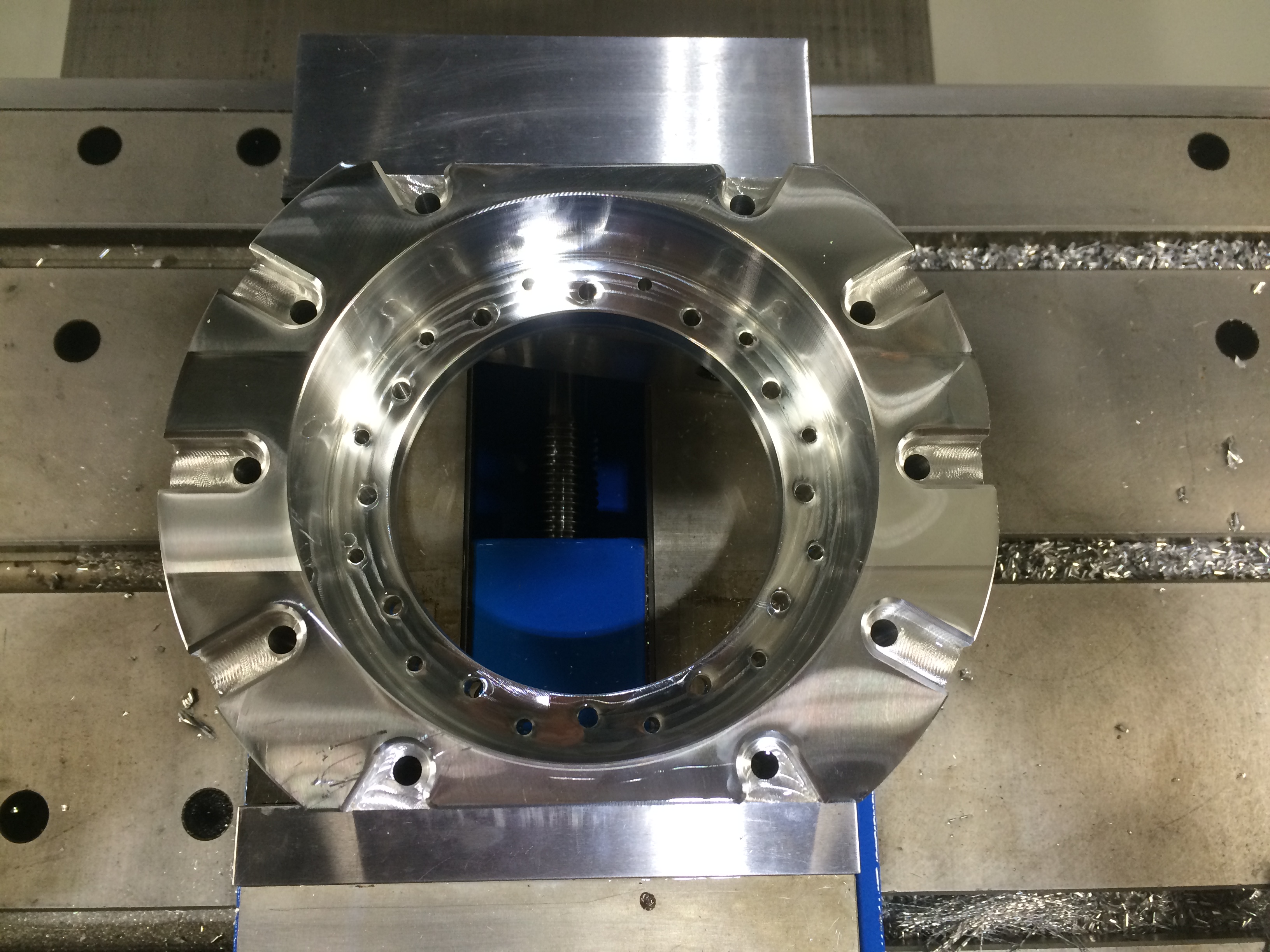
on the bed of the HAAS VF-2-SS CNC mill just after milling.

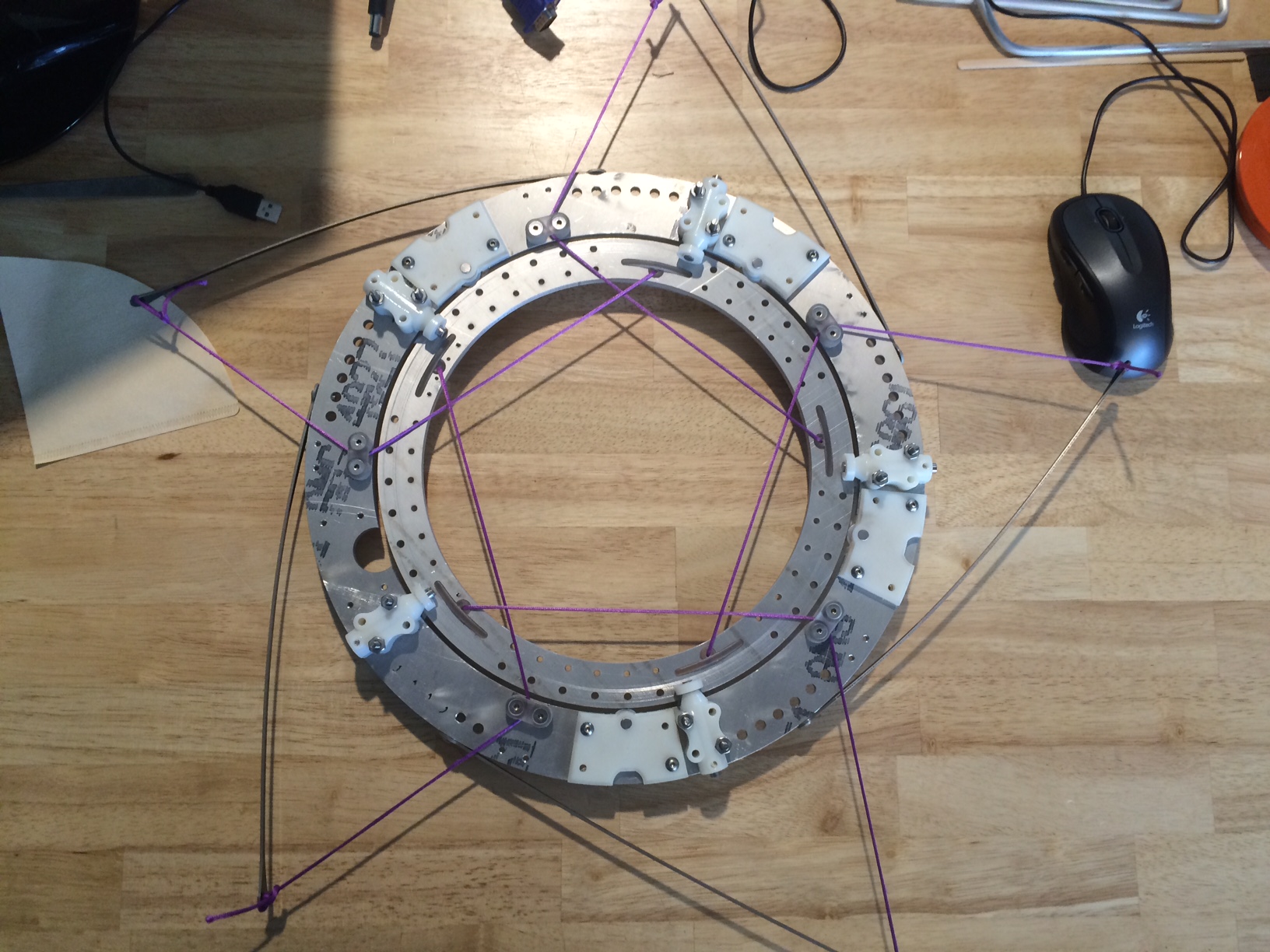
testing the fit of the bore diameter: perfect, with 0.004″ clearance all around.