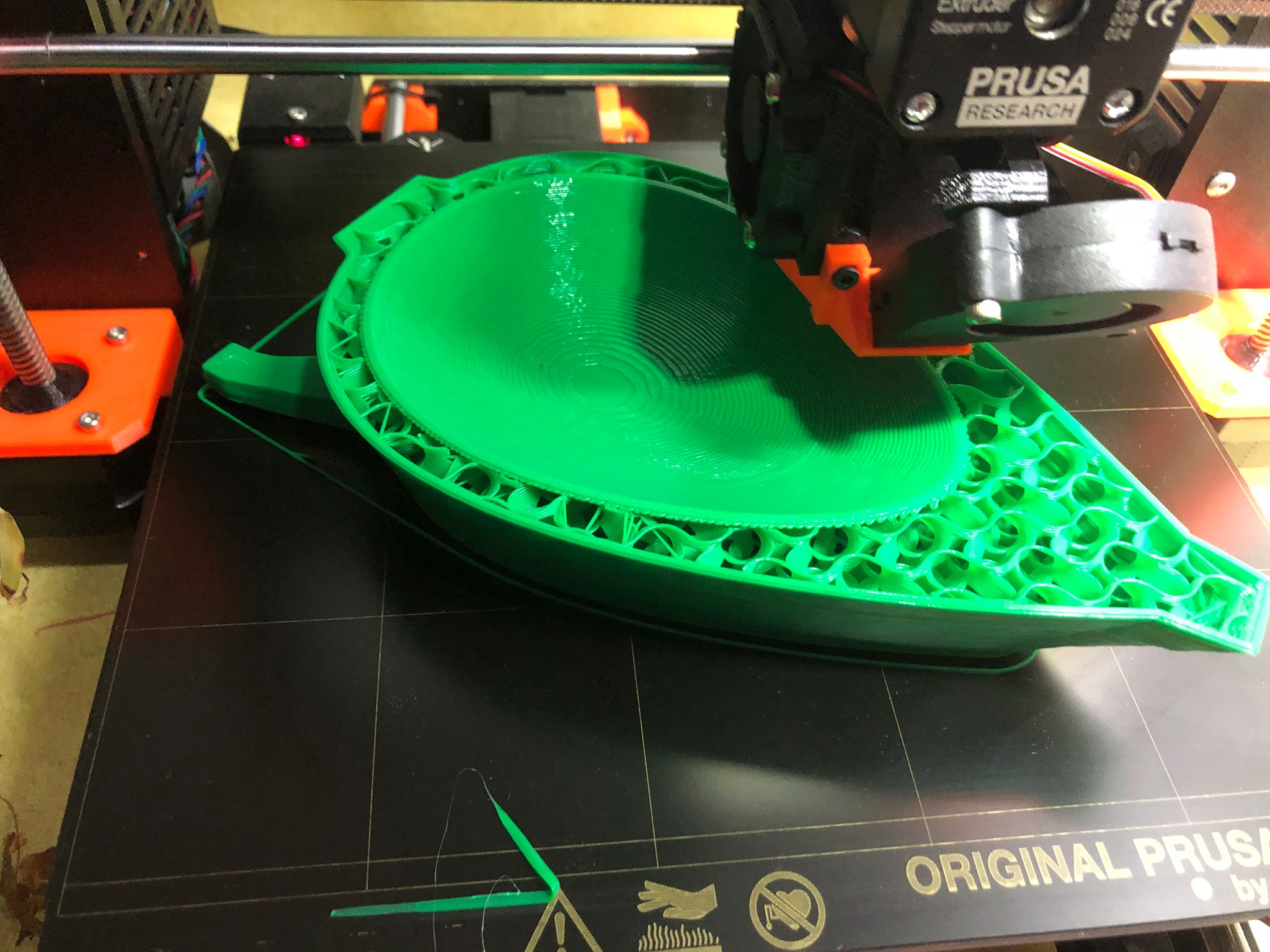
I needed a lightweight, impact resistant, streamlined fairing for a flying robot. I could 3d print a part with the right shape, but 3d printed materials would either be too weak, or too heavy. I’ve been considering a hybrid workflow which this was the perfect opportunity to try out: 3d printing a mold for composite layup.
Carbon Kevlar Nacelle half made in a 3d printed mold. The shape is a solid of revolution using a scaled NACA airfoil shape that has 33% chord-to-length ratio, about 8″ long. The only fault is that some of the mold-filling red paint transferred to the part – a purely cosmetic issue.
It worked wonderfully! The mold printed overnight, and after some sanding primer was applied and sanded down to a 600 grit finish, I waxed the mold, and it was ready to invest with fabric. I vacuum bagged the parts for good consolidation, and am very pleased with the results, shown above.
The nacelle mold was 3d printed in about 8 hours on my Prusa I3 mk3 with an 0.6mm nozzleThe mold after sanding, filling with sanding primer, sanding again, and lastly waxing
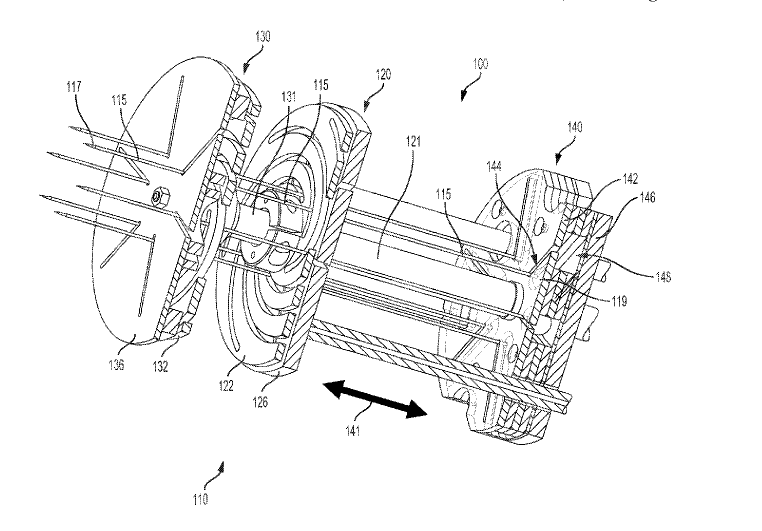
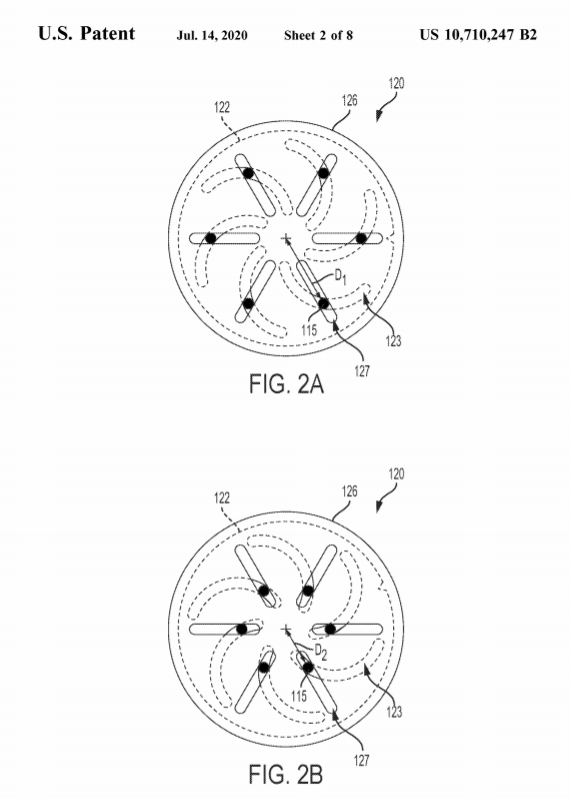
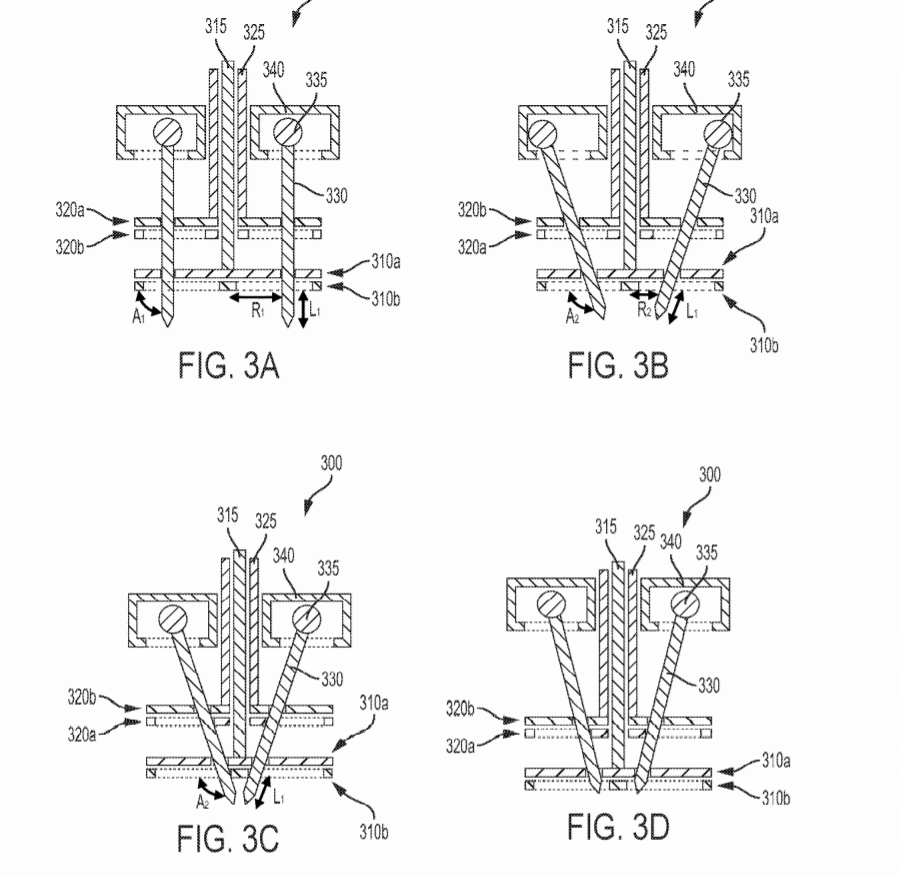
Overview drawing of the Kirkwoood Conical Iris Gripper
I was issued US Patent number 10,710,247 on July 14th 2020 for a new type of robotic gripper device uniquely able to grasp difficult-to-grasp food items.
Robotic preparation of food is hard, in part, because of the difficulty of grasping and manipulating irregular shaped, slippery, and loose aggregated cooking ingredients like chopped onions, shrimp, or loose lettuce. I was asked to consider if any new design could meet the needs of this task, and prototype it. From my previous work with mechanical iris development inspired by the international space station’s Canadarm gripper, (see: CNC Bubble Iris), I realized that a novel 3-degree-of-freedom gripper could meet this need: a conical cage of slender spears, which could change shape in three different ways: taper angle, diameter, and extension. With these motions, I realized it was possible to make a highly effective gripper with a wide repertoire of potential grasping strategies, which could allow for a huge range of ingredients to be handled by a single gripper. The gripper can either open or close like a hand gathering and grabbing a handful of food, or stab like a fork, push food off of that fork, or dispense loose food items gradually, e.g. ‘sprinkling’. This gripper went on to become the primary end effector for a $1M+ commercial research project
The conical iris gripper was rapid prototyped with 3d printing, laser cutting, OEM parts, and a minimum of machining, over the span of about two weeks with other projects going on. The initial prototype was made using mostly laser cut acrylic and off the shelf parts, with a materials cost of less than $150.
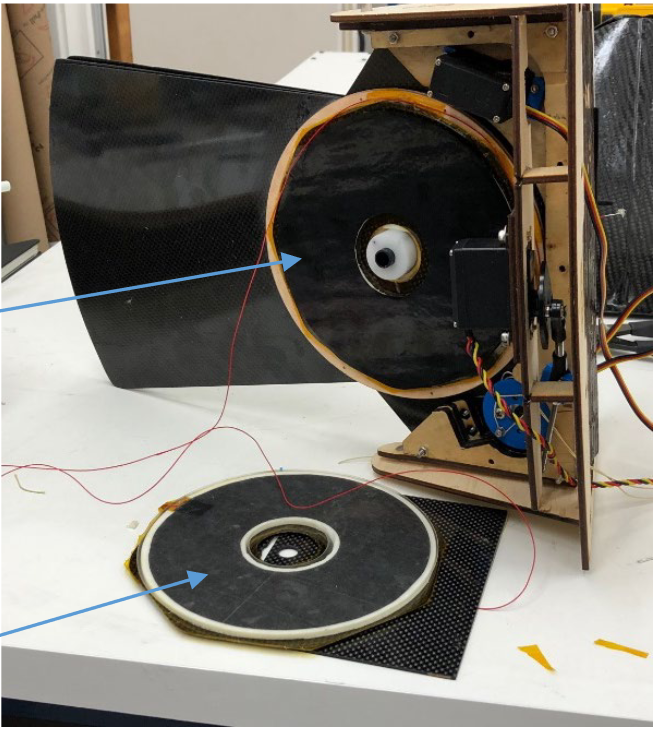
I’m pleased to release a new publication in the Twenty-Second International Conference on Composite Materials (ICCM22) entitled “Enabling Biomimetic Morphing UAVs” with colleagues at SRI, the University of Southern California, and NextGen Aeronautics.
This publication details one application of a technology I have helped develop with my colleague Roy Kornbluh at SRI: ultra-lightweight, ultra-low power, electrolaminate clutches and mechanical multiplexers for reconfigurable systems in aerospace, astronautical, and terrestrial robotic applications.
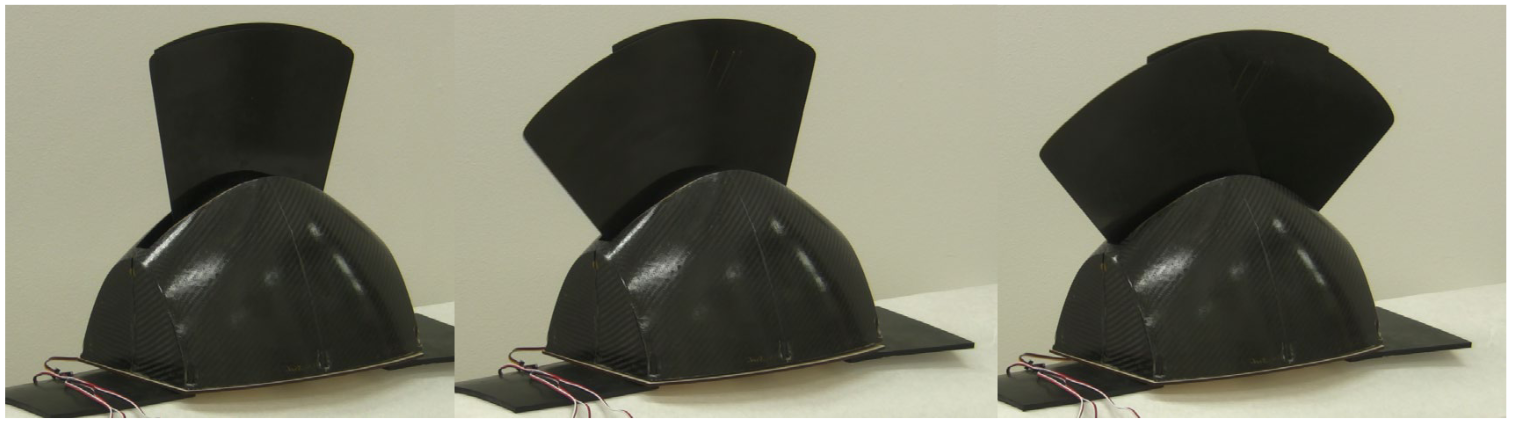
My role in this project was to mechanically design a demonstrator tailfin assembly using these new lightweight, low power, electrolaminate clutches to lock control surfaces of aerial vehicles into variable area configurations. I did all the mechanical and electrical design as well as composite fabrication of the carbon fiber tail and rear fuselage assembly.
Internal structure of prototype electrolaminate clutched tailfin assembly that I designed and built.Molded carbon fiber tail assembly that I designed and built for the Air Force Office of Special Research as a demonstrator of new application of lightweight, low power, electrolaminate technology.
Abstract: This paper reports on the design and testing of a practical, morphing wing aircraft. We intentionally mix and match elements of avian inspired design with novel technologies and proven mechanical components to provide a demonstrator aircraft that shows, in the simplest way, what benefits accrue from basic morphing changes. The simplest and most beneficial morphing concept is to change the wing area and aspect ratio, and it is easy to show that, for an otherwise fixed example configuration, a factor of three decrease in wing planform area can sustain a predicted lift:drag ratio, L/D = 9, when the vehicle flight speed U doubles from 12 to 24 m/s. Without morphing, L/D would be 6.5. Such a large area change can be achieved with a telescoping wing, which is not biomimetic, but is practicable and achievable using standard and custom 3D printed components. We combine this variation with a tail-body configuration that is bio-inspired, and suggested by previous and continuing work on the vehicle-level flight efficiency of tailless aircraft, where a standard tail geometry is replaced by a trailing edge flap that converts the cargo-carrying body into a lifting body. The practical shape-changing is enabled by the use of novel electrolaminate materials that can quickly change stiffness at varying positions/postures.
The Space Frontier Foundation’s annual conference is one of the most important commercial space conferences in the nation, and will be held July 16-18 in Silicon Valley.
Attended by the elite and rising stars of space entrepreneurship and the administrators of NASA, the FAA, and the founders and directors of significant aerospace companies, I am inspired and delighted to play to a crowd of rocket scientists at the culmination of such a conference.
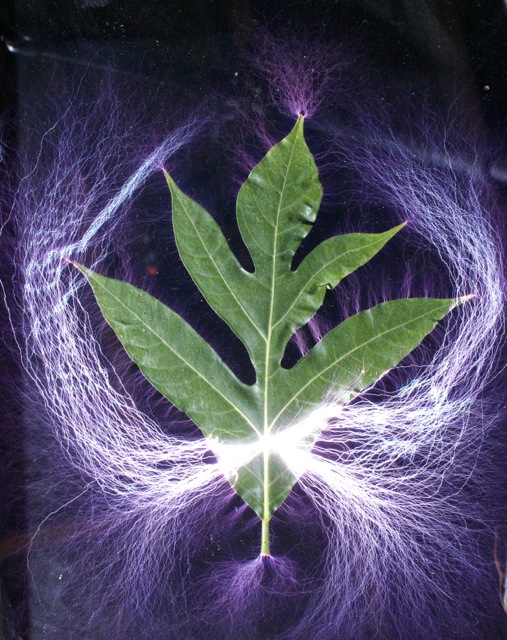
Artocarpus Altilis – the breadfruit tree’s leaf. test shot – with a DSLR – taken just prior to the large format analog film exposure. http://en.wikipedia.org/wiki/Breadfruit
I’ve been home for but a week, and tomorrow I set out on a grand adventure of driving crosscountry in wintertime for a yet grander adventure as an artist in residence at the incomparable Autodesk Pier-9 workshop. Before I go though, I wanted to upload a few of the digital test shots I made while in hawaii this last month, shooting “Electrified Flowers (and leaves) of Hawaii“.
These were off the cuff test shots – throw-aways – done to check my exposure, check the electrical apparatus, and visualize the pattern of branching lightning that I might be about to record onto expensive 20-square-inch large sheets of silver halide and color film. These are not the final products of my project, rather mere teasers of work-in-progress. (I have yet to develop that film, which I’ll do once I can settle into San Francisco.) However, I’m pretty ecstatic with the results, sofar!
One of the most exciting learning discoveries for me during this work is that I can significantly control whether lightning issues radially from the leaf, or tangentially skirting around it, or some mix between the two. I’m looking forward to making an excellent explanation of how this works, both practically and in detailed physical terms. It will probably be a chapter of the book I’m working on, “Theory and Practice of High Voltage Photography”.
Congea Griffithiana, Pink Sandpaper Vine, a.k.a. Shower Orchid. introduced relatively recently to Hawaii. From the Amy B.H. Greenwell Ethnobotanical Garden.Identical leaf as above, taken within about 10 minutes of each other, with a minor but significant change to the charging circuit. Note how different is the form of the lightning!!
“Giddy” cannot begin to describe my feelings upon learning, on Thanksgiving, that I have been selected to be an Artist In Residence at Autodesk’s Pier-9 dream-lab in San-Francisco.
The concentration of brains, initiative, creativity, and capability in that space is stunning. In close approximation to Tony Stark’s workshop (from the movie Iron-Man) — a dream-shop with some of the most capable robotic fabrication equipment and tooling in existence including 3D printers, water-jets, lasers engravers powerful enough to work with metal, multi-axis milling machines, and more — it goes far beyond simple awesome tooling to be, from what I gather, a collegiate atmosphere where everyone is extraordinarily motivated to learn, make, and do things that push the limits of creativity, and in a context where the expected norm is to share and disseminate knowledge through the Instructables knowledge sharing website platform. Buzz Aldrin (Astronaut of Apollo XI moon-landing fame and the second person to walk on the moon after Neil Armstrong) was hanging out there testing a functioning magnetic repulsion hoverboard a few weeks ago, for instance. To be included in the cohort of selected artists for 2015 is a huge honor and inspires me to the grandest ambitions. Thank you, universe. Thank you, Noah. Thank you, Vanessa. Thank you, Mary. Thank you, Karen.
I’m fascinated with ephemeral phenomena, and the most recent manifestation of this has led me to invent some elaborate technical apparatus to make photographs of huge bubbles doing interesting things. Here are two videos of it working for the first time- the first with a series of close-up views of different components, the second as a wide-view of the whole system in operation.
Giant bubbles are uniquely able to engage and delight people of all types. Who can resist feeling wonder and awe at giant, floating, opalescent, undulating transparent orbs and the salience they give to normally invisible 3-dimensional flows? After my first experience blowing bubbles from a moving bicycle (the wind past the bicycle removes any requirement to blow or move the wand, you just adjust your speed to get the right wind), I was hooked.
I’ve organized a number of bubble blowing events, especially the “Bubbles on Bikes Jamboree Ride” for Bike Pittsburgh’s Bikefest and the first ever “Giant Bubbles Flash Mob”. For the latter, I manufactured 45 giant bubble wands, and about 25 gallons of giant bubble juice, and coordinated a synchronized release of ridiculously many insanely huge giant bubbles. Beyond the pre-arranged 45 bubble blowers, we had the fully invested attention and participation of somewhere between 300 and 500 people for several solid hours. All for about two days prep and maybe $200 in materials (including the pizza for the wand-making party). See the nicely polished video made by Ben Saks of Float Pictures here, or the great single-take cellphone video clip from Jason Kirin here.
For some things I’d like to do, I required a highly repeatable way of producing bubbles, and controlling aspects like timing and size and speed and direction. I also love a good engineering challenge, and so I invented a cable iris aperture mechanism and set out to use it to make a uniquely flexible and useful bubble machine. A CNC bubble machine.
There’s a few very sophisticated things I’d like to do with this which I’ll write about later, but for the first project I’m looking forward to making playful occupational portraits of some friends, mentors, and elders I feel lucky to know and learn from. I’m fortunate to have a few such in my life, in their sixties, seventies and eighties, and who in addition to great technical accomplishments, embody wonderful spirits of playfulness and creativity in their golden years that it’d be my pleasure to honor and record with such portraits.
Can you fathom what it must feel like to be one of the astronomers who, 45 years ago, discovered a comet, and is here today watching as we as a species are rendezvousing with that comet, gently landing a 200 pound Philae probe onto the surface, while we watch from the orbiting Rosetta spacecraft 19 miles above?
This is so humbling and inspiring to witness. Congratulations to everyone involved, especially the engineers which, by the various slingshot maneuvers, accelerated this spacecraft so deep into space on such a perfectly accurate trajectory to hit a bullseye hundreds of millions of miles away!!
Watch this amazing animation of the incredible 12 year long, half-a-billion-mile, bullseye we will see stick it’s landing here in less than one hour!!